

Το micro: bit είναι μια μικρή αλλά ισχυρή και ισχυρή πλακέτα πρωτότυπης σχεδίασης, σχεδιασμένη από το BBC (τον αγγλικό ραδιοτηλεοπτικό φορέα), που μπορεί εύκολα να προγραμματιστεί από έναν προσωπικό υπολογιστή.
Εκτός από τον μικροελεγκτή που αντιπροσωπεύει τον πυρήνα του, έχει πάνω στην πλακέτα αισθητήρες όπως το επιταχυνσιόμετρο, την πυξίδα και μια μικρή "οθόνη" που αποτελείται από μια μήτρα LED 5x5. Η μικρή πλακέτα διαθέτει ενσωματωμένη ασύρματη σύνδεση Bluetooth LE 2,4 GHz, υλοποιούμενη χάρη σε έναν αποκλειστικό πομποδέκτη και ένα ιδιόκτητο πρωτόκολλο, δίπλα από μια κεραία ενσωματωμένη στο PCB.
Συνδυάζοντας την ευκολία χρήσης του micro: bit και ενός ελεγκτή κινητήρα, σε αυτό το άρθρο θα σας δείξουμε πώς να δημιουργήσετε ένα ρομπότ με τροχούς που μπορεί να ελεγχθεί μέσω μιας εφαρμογής από το smartphone σας χρησιμοποιώντας τον ενσωματωμένο σύνδεσμο χαμηλής ενέργειας Bluetooth.
Για αρχή, πρέπει να αναφέρουμε την προέλευση και τη δομή του micro: bit. Το micro: bit project (http://microbit.org/) είναι ένα έργο με υποστηρικτή και συντονιστή το BBC, (με το μη κερδοσκοπικό στόχο να παρέχει στα παιδιά και τους φοιτητές μια πλατφόρμα για να μάθουν εύκολα τα βασικά του προγραμματισμού ) , και υποστηρίζεται επίσης από πολλές εταιρείες-εταίρους, εκ των οποίων το καθένα παρέχει μέρος των συστατικών στοιχείων επί της πλακέτας, μεταξύ αυτών των εταιρειών μπορούμε να βρούμε την ARM (παρέχοντας τον επεξεργαστή της γνωστής αρχιτεκτονικής), την Freescale (που παρέχει τους αισθητήρες), τη Nordic Semiconductor (παρέχοντας τον πομποδέκτη και τον ελεγκτή Bluetooth), τη Samsung και άλλους.
Οι αισθητήρες που βρίσκονται πάνω στην πλακέτα επιτρέπουν την ανάπτυξη διάφορων εφαρμογών, όπως εφαρμογές IoT και φορητές ηλεκτρονικές εφαρμογές. Οι αισθητήρες συνδέονται στον κεντρικό ελεγκτή μέσω του διαύλου I²C που είναι συνδεδεμένος στους ακροδέκτες P19 (SCL και P20 (SDA) στον ακροδέκτη GPIO (με άμεση εισαγωγή). Οι αισθητήρες της πλακέτας επιτρέπουν την ανάπτυξη διαφόρων εφαρμογών όπως εφαρμογές IoT και φορητές ηλεκτρονικές συσκευές Οι αισθητήρες συνδέονται στον κεντρικό ελεγκτή μέσω του διαύλου I²C που είναι συνδεδεμένος στους ακροδέκτες P19 (SCL και P20 (SDA) στο βύσμα GPIO (με άμεση εισαγωγή).
Το μαγνητόμετρο μπορεί να δημιουργήσει ένα interrupt προς τον κύριο επεξεργαστή ενώ το επιταχυνσιόμετρο μπορεί να παράγει δύο διαφορετικές interrupts προς τον κύριο επεξεργαστή. Το τελευταίο, ένα nRF51, περιλαμβάνει επίσης έναν αισθητήρα θερμοκρασίας.
Το ρομπότ
Μετά από αυτή τη σύντομη εισαγωγή στην πλακέτα micro: bit μπορούμε να φτάσουμε στο κυρίως θέμα, δηλαδή να περιγράψουμε το σχέδιο του ρομπότ σε ρόδες.
Τα ηλεκτρονικά του ρομπότ μας αποτελούνται από ένα board micro: bit που είναι ενσωματωμένο στον σύνδεσμο μιας κάρτας σταθμού βάσης, το οποίο θα επιτρέψει τη δημιουργία ηλεκτρικών συνδέσεων με το υπόλοιπο υλικό, αποτελούμενο από τον ελεγκτή που βασίζεται στον ενσωματωμένο οδηγό L298N από μειωτές στροφών ST που δοκιμάστηκαν από αυτό.
Όσον αφορά τη δομή του ρομπότ μας, επιλέξαμε το frame kit που πωλείται από την Open Electronics με τον κωδικό προϊόντος 2846-FISHGOCHASSIS, συμπεριλαμβανομένης μιας ρομποτικής πλατφόρμας αποτελούμενης από ένα σώμα από πλεξιγκλάς που αποτελείται από δύο πλάκες, δύο μοτέρ, δύο τροχούς Tamiya, ένα μεταλλικό σφαιριστήριο, εκτροπέα, πρίζα ρεύματος, θήκη μπαταριών 4xAA με βίδες, παξιμάδια και εξαγωνικούς κοχλίες για τη συναρμολόγηση των δύο πλακών.
Όσο για τον προγραμματισμό, αφού έχουμε να κάνουμε με το micro: bit, θα επιλέξουμε το ειδικό περιβάλλον γλώσσας και ανάπτυξης του, δηλαδή το Block Editor (www.microbit.co.uk/blocks/editor#).
Τώρα, θα ξεκινήσουμε περιγράφοντας τον τρόπο κατασκευής του υλικού, δηλαδή του ρομπότ μας σε τροχούς.
H κατασκευή
Για το τμήμα ηλεκτρονικών, δεδομένης της απλότητας του διαγράμματος κυκλωμάτων, θέλαμε να αποφύγουμε ένα τυπωμένο κύκλωμα και να συνδέσουμε μαζί τις μονάδες και τους κινητήρες, επιλέγοντας τη σύνδεση του micro: bit με τους οδηγούς του κινητήρα και την πηγή τροφοδοσίας χρησιμοποιώντας jumper cables (όπως στα Arduino). Επίσης, πρόκειται να συνδέσουμε τους μοχλοδιακόπτες στον πίνακα οδηγών του κινητήρα. οι κινητήρες που χρησιμοποιούνται έχουν λόγο αναγωγής 120: 1 και 180 σ.α.λ. όταν τροφοδοτούνται από 6 Vcc.
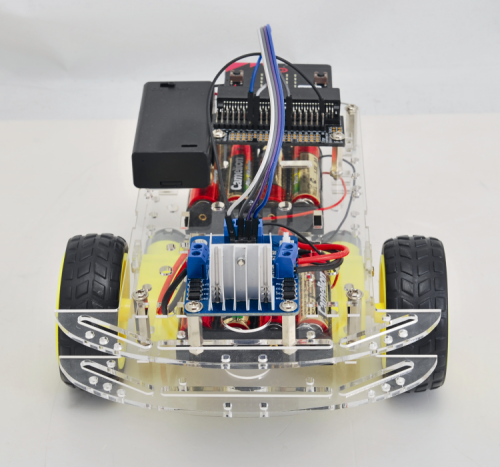
Παρά το σημαντικό αριθμό καλωδίων που χρησιμοποιούνται, το αποτέλεσμα θα είναι πολύ τακτοποιημένο και οπτικά «καθαρό», ειδικά εάν πρόκειται να δέσετε μαζί τα καλώδια και να τα στερεώσετε στη θέση τους μόλις ολοκληρωθεί η καλωδίωση. Δεδομένου ότι τα ηλεκτρονικά τοποθετούνται στον μηχανισμό, θα ξεκινήσουμε κατασκευάζοντας το τελευταίο, το οποίο περιλαμβάνει HSE και δύο μοτέρ με μπροστινούς τροχούς, καθώς και έναν τροχό περιστροφής στο πίσω μέρος. η λίστα με τα τμήματα που απαιτούνται για την κατασκευή του τμήματος μηχανικής περιλαμβάνεται στο πλαίσιο Υλικό που απαιτείται.
Μόλις έχουμε όλα τα στοιχεία, το πρώτο πράγμα που πρέπει να κάνουμε είναι να συναρμολογήσουμε το πλαίσιο (αποτελείται από μια πλάκα κορυφής που θα φιλοξενεί όλα τα ηλεκτρονικά και μια βάση που θα φιλοξενεί μπαταρίες και τροχούς, τοποθετημένους στους αντίστοιχους moto-reducers). Για να συνδέσετε τα δύο πλαίσια, πρόκειται να χρησιμοποιήσουμε τις παρεχόμενες βίδες 3MA και τις εξαγωνικές βίδες που πρόκειται να βιδώσετε στην πλάκα πυθμένα χρησιμοποιώντας τα παξιμάδια 3MA. Συνολικά, θα χρειαστείτε 4 βίδες και πολλές βίδες δίπλα στα αντίστοιχα παξιμάδια.
Στην κάτω πλευρά του πλαισίου πρόκειται να τοποθετήσουμε τους μειωτήρες στροφών, χρησιμοποιώντας βίδες 3ΜΑ και παξιμάδια, αφού τους βάλουμε στα ειδικά πλαστικά στηρίγματα "που κατεβαίνουν" από το κάτω μέρος του πλαισίου.
Κάθε μειωτήρας στροφών μπορεί να σταθεροποιηθεί χρησιμοποιώντας τα δύο στηρίγματα που πρέπει να τοποθετηθούν στο πλαίσιο στις αποκλειστικές υποδοχές, πρώτα βιδώνοντας πρώτα την κάτω εξωτερική βάση, μετά τον μοτοδιακόπτη και τέλος την εσωτερική βάση. Βιδώστε τη βίδα με παξιμάδι και επαναλάβετε τη λειτουργία στην επάνω τρύπα.
Τέλος, πρόκειται να τοποθετήσουμε τους διαστολικούς κοχλίες χρησιμοποιώντας οκτώ κοχλίες (τέσσερις για κάθε πλευρά) για να τοποθετήσουμε την μπάλα που θα χρησιμοποιηθεί για να κρατήσει το ρομπότ να στέκεται. οι τέσσερις εξαγωνικοί κοχλίες έχουν σπείρωμα 3ΜΑ και έχουν μήκος 15 mm το καθένα.
Στην επάνω πλάκα του πλαισίου, πρόκειται να τοποθετήσετε και να στερεώσετε τον οδηγό του μοτέρ και το micro: bit (χρησιμοποιώντας το συνηθισμένο 3MA x 15 mm).
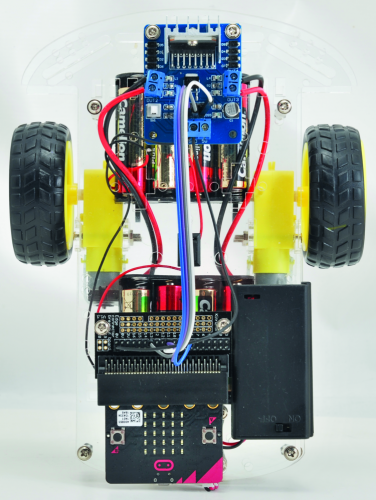
Μπορούμε τώρα να αρχίσουμε με την καλωδίωση, η οποία περιγράφεται καλύτερα από το σύστημα στην εικόνα.

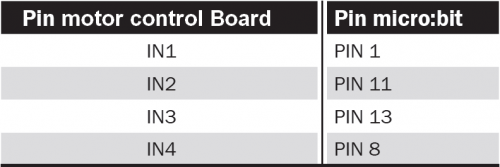
Οι συνδέσεις μεταξύ του οδηγού των μειωτήρων στροφών και της πλακέτας micro: bit απεικονίζονται στην εικόνα και ανακεφαλαιώνονται στον πίνακα 1. Σημειώστε ότι για τον έλεγχο των κινητήρων επιλέξαμε μια μονάδα βασισμένη στο ολοκληρωμένο κύκλωμα ST L298N, ένα από τα πλέον χρησιμοποιούμενα για τέτοια έργα. Οι συνδέσεις είναι πολύ εύκολες για το πρόγραμμα που πρόκειται να χρησιμοποιήσουμε, ακόμα και για τους αρχάριους του εφαρμοσμένου ηλεκτρονικού κόσμου, πρόκειται να συνδέσουμε τον πρώτο κινητήρα, ο οποίος είναι ο αριστερός ηλεκτροκινητήρας στην περίπτωσή μας, στους ακροδέκτες OUT1 και OUT2 και πρόκειται να συνδέσουμε τον δεύτερο κινητήρα, ο οποίος είναι δεξιά μας, στο OUT3 και στο OUT4. Η πλακέτα micro: bit μπορεί να τροφοδοτηθεί με ένα τυπικό καλώδιο micro USB ή με μια τάση άμεσης τάσης 3 V (μπορείτε να χρησιμοποιήσετε μόνο μία πηγή τροφοδοσίας τη δεδομένη στιγμή), την οποία λαμβάνουμε στην περίπτωσή μας από δύο μπαταρίες 1,5 V τοποθετημένες στην θέση για τις μπαταρίες που είναι εφοδιασμένο με micro: bit και εξοπλισμένο με ολισθαίνοντα διακόπτη (για να το ενεργοποιήσετε και να απενεργοποιήσετε), όπως φαίνεται από το βέλος στο σχήμα.
Εν πάση περιπτώσει, πρέπει να θυμάστε ότι για να διευκολύνουμε τις συνδέσεις micro: bit, μπορούμε να χρησιμοποιήσουμε ένα είδος σταθμού σύνδεσης που έχει μια άμεση υποδοχή εισόδου στη μία πλευρά για να φιλοξενήσει το micro: bit και ένα PCB στην άλλη πλευρά από όπου μπορείτε πρόσβαση σε όλες τις συνδέσεις του σκάφους.
Μόλις ολοκληρωθεί η καλωδίωση, πρέπει να συνδέσετε τα δύο διαμερίσματα των μπαταριών συνδέοντας την ισχύ του οδηγού του κινητήρα μέσω του διακόπτη για να μπορείτε να απενεργοποιήσετε την κίνηση οποιαδήποτε στιγμή.
Λάβετε υπόψη ότι ο διακόπτης ενεργοποίησης / απενεργοποίησης της κίνησης τοποθετείται στον ειδικό κεντρικό χώρο του άνω μέρους του πλαισίου. Τα διαμερίσματα των μπαταριών πρέπει να είναι καλωδιωμένα με τη συγκόλληση του μαύρου καλωδίου της θήκης μπαταριών στον κεντρικό πείρο και ένα άλλο καλώδιο στον άλλο πείρο που θα συνδεθεί στη μονάδα μοτέρ. Τα διαμερίσματα των μπαταριών πρέπει να είναι στερεωμένα στο κάτω μέρος του πλαισίου χρησιμοποιώντας δύο βίδες και δύο παξιμάδια.
Το λογισμικό
Εντάξει, τώρα που ολοκληρώσαμε την κατασκευή του ρομπότ, ας προχωρήσουμε στην πλευρά του λογισμικού, η οποία περιλαμβάνει το micro: bit στη μία πλευρά και το smartphone που πρόκειται να χρησιμοποιήσετε ως τηλεχειριστήριο από την άλλη.
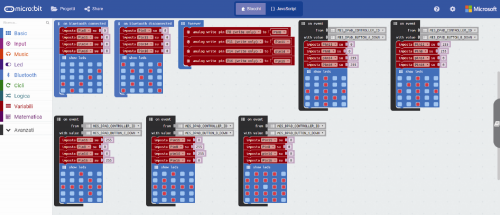
Στην πλευρά micro: bit πρέπει να γράψουμε και να φορτώσουμε το υλικολογισμικό. σας υπενθυμίζουμε ότι είναι γραμμένο με τον Block Editor, μια οπτική γλώσσα αρκετά απλή για να προσεγγιστεί ακόμα και από προγραμματιστές newbies. Από τον επίσημο ιστότοπο micro: bit μπορείτε, ωστόσο, να χρησιμοποιήσετε διαφορετικές γλώσσες για τον προγραμματισμό, αλλά επιλέξαμε τον Block Editor επειδή επιτρέπει έναν πολύ απλοποιημένο προγραμματισμό Java, ώστε να γίνει εύκολη η χρήση της συσκευής. στην πραγματικότητα, δεν χρησιμοποιεί γραμμές κώδικα για να προγραμματίσει, αλλά ένα σύστημα με παζλ-όπως μπλοκ αλληλεπίδρασης που θα κάνουν το πρόγραμμα πολύ πιο σαφή ακόμη και σε όσους είναι πλήρεις αρχάριοι, όταν πρόκειται για τον προγραμματισμό.
Φυσικά, μπορείτε επίσης να χρησιμοποιήσετε τις κλασσικές γραμμές κώδικα, αν το νιώθετε και πρέπει να έχετε δεξιότητες για αυτό.
Το πρόγραμμα μπορείτε να το δείτε σε μορφή για να προβληθεί σε σχήμα μπλοκ micro: bit, και μπορείτε να το κατεβάσετε από τον ιστότοπό μας μαζί με τα άλλα αρχεία του έργου (θα βρείτε επίσης μια javascript, αν προτιμάτε). Εναλλακτικά μπορείτε να το βρείτε στην ηλεκτρονική διεύθυνση: https://makecode.microbit.org/28400-70583-92133-46155. Για να το φορτώσετε στην κάρτα micro: bit, πρέπει πρώτα να συνδέσετε την πλακέτα στον υπολογιστή στον οποίο έχει εγκατασταθεί το περιβάλλον ανάπτυξης μέσω ενός καλωδίου micro USB.
Εάν συνδέσετε σωστά την κάρτα, η σύνδεση θα επισημαίνεται με την πορτοκαλί κίτρινη ενδεικτική λυχνία που ανάβει (τοποθετημένη δίπλα στο βύσμα micro USB) όπως φαίνεται στην εικόνα.

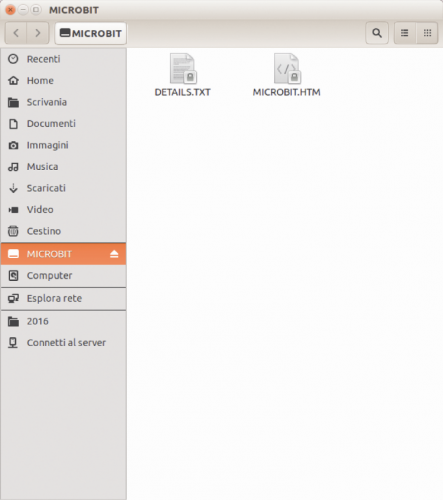
Αφού ολοκληρώσετε το πρόγραμμα, μπορείτε να το κατεβάσετε πατώντας το κουμπί "λήψη" και τέλος να σύρετε το αρχείο στον φάκελο του πίνακα. θα παρατηρήσετε ότι η πλακέτα, μόλις συνδεθεί και εγκατασταθεί από το λειτουργικό σύστημα, θα αναγνωριστεί ως αποσπώμενη μονάδα μαζικής αποθήκευσης.
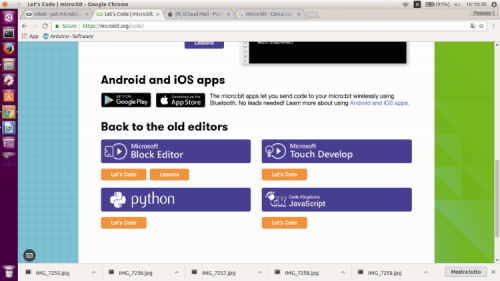
Αφού προγραμματίσετε το micro: bit, ας προχωρήσουμε στο smartphone. Προκειμένου να δοκιμάσουμε το ρομπότ μας μέσω ενός smartphone, χρησιμοποιώντας τη σύνδεση Bluetooth, χρειαζόμαστε δύο εφαρμογές: η πρώτη επιτρέπει τη σύνδεση με τη σύνδεση Bluetooth, την πλακέτα micro: bit στο smartphone και είναι στην πραγματικότητα διαθέσιμη τόσο για Android όσο και για iOS (όπως εμφανίζεται στη σελίδα λήψης που φαίνεται στο σχήμα, οπότε αν δεν διαθέτετε ένα smartphone Android, αλλά ένα iPhone της Apple, μπορείτε να το χρησιμοποιήσετε.
Αφού κατεβάσετε και εγκαταστήσετε την εφαρμογή, για να συνδέσετε το smartphone σας στη πλακέτα θα πρέπει να ανοίξετε την εφαρμογή micro-bit, κάντε κλικ στο εικονίδιο "Connection" και μετά κάντε κλικ στο "Pair a new micro: bit" και ακολουθήστε τις οδηγίες.
Τώρα, ας προχωρήσουμε στη δεύτερη εφαρμογή, επιτρέποντας τον έλεγχο του ρομπότ απευθείας μέσω ενός εικονικού joystick που υλοποιείται στην οθόνη αφής του smartphone.
Αφού συνδέσετε το micro: bit μέσω Bluetooth, θα πρέπει να ανοίξετε την εφαρμογή που ονομάζεται "ελεγκτής παιχνιδιών" και πατήστε το κουμπί "σάρωση" για να βρείτε την πλακέτα micro: bit του ρομπότ, συνδέστε το στο smartphone σας μέσω Bluetooth. Μόλις δημιουργηθεί η σύνδεση, θα μπορείτε να ελέγχετε το ρομπότ σας χρησιμοποιώντας τα εικονικά κλειδιά στην οθόνη σας.

Συμπεράσματα
Εντάξει, αυτό είναι όλα για το έργο. Το ρομπότ με ρόδες που έχουμε προτείνει σε αυτές τις σελίδες, αν και απαραίτητο, μπορεί να προσαρμοστεί σε μεγάλο βαθμό από τον καθένα από εσάς και είναι μια χρήσιμη υποστήριξη για να μάθετε να προγραμματίζετε με micro:bit, και να γνωρίσετε όλα τα χαρακτηριστικά του. Με την προσθήκη ειδικών αισθητήρων μπορείτε να βάλετε τις συνθήκες σε κάθε ενέργεια ανίχνευσης και μπορείτε ακόμη και να επιτρέψετε να κινηθεί αυτόνομα. Για παράδειγμα, μπορείτε να εξοπλίσετε το ρομπότ με γραμμικούς ανιχνευτές IR (LED + φωτοδίοδο) για να μετακινήσετε το σύστημα σε ένα κομμάτι ή προσθέστε ένα επιταχυνσιόμετρο για να ανιχνεύσετε τις κινήσεις και την αντίστοιχη ταχύτητα.
Μπορείτε επίσης να επωφεληθείτε από τους αισθητήρες της πλακέτας για να εφαρμόσετε λειτουργίες που δεν έχουμε χρησιμοποιήσει εδώ (δεδομένων του εκπαιδευτικού χαρακτήρα του έργου) όπως η μέτρηση της θερμοκρασίας χώρου και άλλων παραμέτρων.
Ελπίζουμε ότι θα απολαύσετε αυτό το έργο και θα διασκεδάσετε πειραματιζόμενοι με το micro: bit!
Πηγή άρθρου: https://www.open-electronics.org/create-your-robot-with-microbit/