

Η NASA προχώρησε ένα βήμα παραπέρα στην ανοιχτή διάθεση των έργων της, και μοιράζει με άδεια ανοιχτού κώδικα το λογισμικό για τα ιπτάμενα ρομπότ τηςν που λέγονται Astrobees, τα οποία θα κατοικούν στον Διεθνή Διαστημικό Σταθμό (ISS) ως μέρος δοκιμής τεχνολογίας σε περιβάλλοντα μηδενικής βαρύτητας. Επίσης, η τεκμηρίωση που παρέχει σημαντική, μιας και συμπεριλαμβάνει σχεδόν τα πάντα: από το concept research και τον εντοπισμό μέχρι και τις συστάσεις για "guest scientists " για την υλοποίηση του σχεδιασμού.
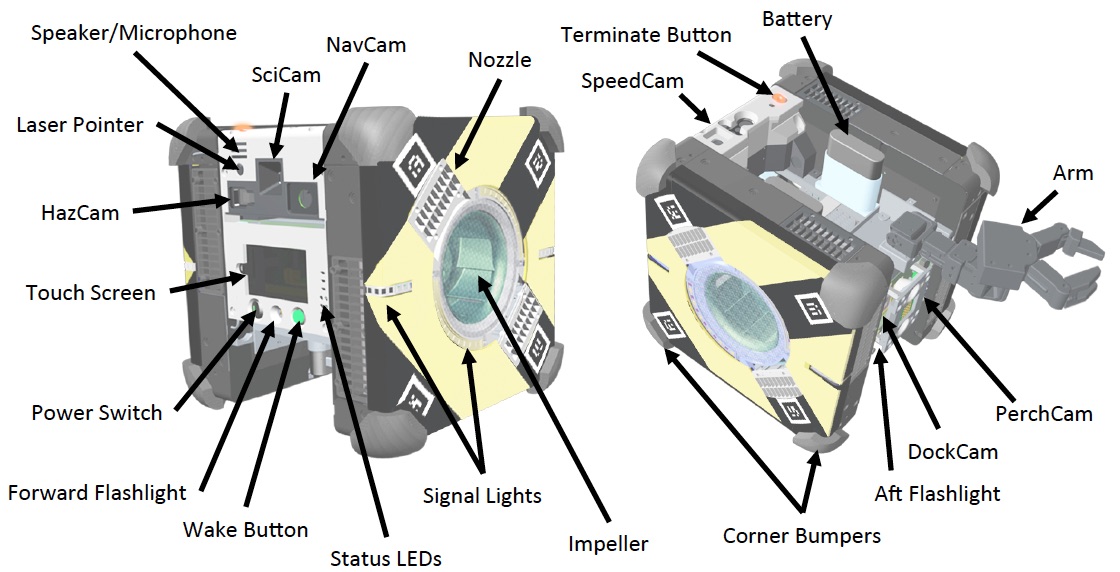
Tο Astrobee είναι ένα ρομπότ ελεύθερης πτήσης που έχει σχεδιαστεί για να λειτουργεί στον Διεθνή Διαστημικό Σταθμό (ISS). Το λογισμικό ρομπότ Astrobee (ARS) αποτελείται από το ενσωματωμένο (επί του σκάφους) λογισμικό και έναν προσομοιωτή. Το ARS λειτουργεί στα Astrobees τρεις εσωτερικούς υπολογιστές και χρησιμοποιεί το λειτουργικό σύστημα ρομπoτικής ανοιχτού κώδικα (ROS) για τη σύνδεση των πολλαπλών ενοτήτων λογισμικού.
Το ARS εκτελεί τον εντοπισμό και την πλοήγηση του Astrobee, υποστηρίζει την αυτόνομη σύνδεση και αγκύρωση, διαχειρίζεται διάφορους αισθητήρες και ενεργοποιητές και υποστηρίζει την αλληλεπίδραση των χρηστών (μέσω οθόνης, φωτεινής σηματοδότησης και ήχου). Το ARS δίνει τη δυνατότητα στο Astrobee να λειτουργεί σε πολλαπλές λειτουργίες: εκτέλεση σχεδίου με βάση το σχέδιο (sequencing εντολών), τηλελειτουργία ή guest science. Ο προσομοιωτής επιτρέπει την προσομοίωση του λογισμικού της κινητικότητας toy Astrobee χωρίς να χρειάζεται οποιοδήποτε hardware ρομπoτικής.
Δείτε περισσότερα στο https://github.com/nasa/astrobee
Δείτε και τον κώδικα για το android https://github.com/nasa/astrobee_android